
Design and Construction of an Electric Wheelchair with Joystick-Based DC Motor Control and YOLO Object Detection
Keywords:
Electric wheelchair, Joystick control, yolo, Object detection, Computer visionAbstract
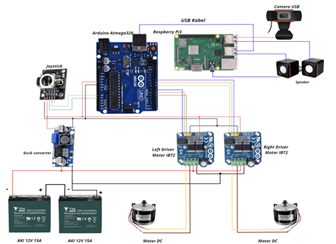
Electric wheelchairs have become an essential solution for individuals with mobility limitations; however, safe and responsive control remains a primary challenge. This thesis aims to design an electric wheelchair system integrated with joystick control and object detection technology using YOLOv4 to enhance safety, accuracy, and user-friendliness. The joystick control system serves as the primary user interface for wheelchair navigation, while the safety system utilizes computer vision technology based on YOLOv4. The computational process is executed on a Raspberry Pi 3 device. The electric wheelchair automatically stops and provides audio warnings when obstacles are detected, implemented using an Arduino Uno to control the speed and direction of DC motors while ensuring user safety. An experimental method is employed in the design of this electric wheelchair. Testing results demonstrate that the joystick-based control system responds appropriately to user commands, including forward, backward, right, left, rotation, and braking. The YOLO object detection system achieves an average object detection accuracy of 98% with an average computational time of 3 to 5 seconds. The wheelchair can support a maximum load of 70 kg
Downloads
References
[1] W. Szaj, M. Wanic, W. Wojnarowska, and S. Miechowicz, “Mechatronic Anticollision System for Electric Wheelchairs Based on a Time-of-Flight Sensor,” Electronics, vol. 14, no. 11, p. 2307, 2025. https://doi.org/10.3390/electronics14112307
[2] M. Kmich, H. Karmouni, and M. Sayyouri, “Improved PID Controller using Archimedes’ Optimization Algorithm to Control an Electric Wheelchair,” in 2025 7th Global Power, Energy and Communication Conference (GPECOM), IEEE, 2025, pp. 176–181 https://doi.org/10.1109/GPECOM65896.2025.11062018.
[3] Å. M.-B. Vassbø and G. Mørk, “Children’s opportunities and rights for mobility and participation: Occupational therapists’ experiences with paediatric powered mobility,” Scand. J. Occup. Ther., vol. 32, no. 1, p. 2520863, 2025. https://doi.org/10.1080/11038128.2025.2520863
[4] J.-M. Ahn, K.-H. Ha, J.-H. Cho, H. Seo, and D.-K. Lim, “Optimal Design of SPMSM Using a Subdivided Meta-Model Assisted Multi-Objective Optimization Algorithm,” J. Electr. Eng. Technol., pp. 1–17, 2025. https://doi.org/10.1007/s42835-025-02326-y
[5] A. Haddoun, D. Djabri, M. Saidani, and M. Benbouzid, “Development and Evaluation of a Head-Controlled Wheelchair System for Users with Severe Motor Impairments,” MethodsX, p. 103485, 2025. https://doi.org/10.1016/j.mex.2025.103485
[6] L. Yang and G.-Y. Chen, “Evaluation of Deep Learning for Caries Detection With Fine-Grained Classification and Postprocessing Improvements,” Int. Dent. J., vol. 75, no. 5, p. 100898, 2025. https://doi.org/10.1016/j.identj.2025.100898
[7] Y. Liang et al., “MAH-YOLO: an enhanced YOLOv8n framework for loess landslide detection with multi-attention mechanisms,” Int. J. Digit. Earth, vol. 18, no. 1, p. 2536666, 2025. https://doi.org/10.1080/17538947.2025.2536666
[8] J. Liu, C. Feng, G. Jin, and J. Fan, “EdLLM: A Novel Entity Detection Method for Test Data Integrating YOLO-World and LLM,” in International Conference on Intelligent Computing, Springer, 2025, pp. 195–206. https://doi.org/10.1007/978-981-96-9815-8_17
[9] Q. T. Lam, M. H. N. Le, I.-T. Lee, and N. Q. K. Le, “Evaluating YOLO for dental caries diagnosis: a systematic review and meta-analysis,” Evid. Based. Dent., pp. 1–14, 2025. https://doi.org/10.1038/s41432-025-01180-1
[10] Q. Liu, X. Wang, A. Yang, Z. Hu, and X. Zhang, “ODC-YOLO: an optimized YOLOv5 method for detecting objects in remote sensing images,” Remote Sens. Lett., vol. 16, no. 10, pp. 1120–1130, 2025. https://doi.org/10.1080/2150704X.2025.2529599
[11] D. Zielasko, “A Technical Overview on Cutting-Edge Human-Joystick Locomotion aka Leaning in VR: Intuitive, Fun, Calibration-Free, and Open Source,” in 2025 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW), IEEE, 2025, pp. 261–265. https://doi.org/10.1109/VRW66409.2025.00062
[12] Y. Lee, K. A. Hull, and J. Kim, “Beyond the joystick: Exploring the relationship between game addiction trajectories and aggression dimensions,” J. Crim. Justice, vol. 98, p. 102425, 2025. https://doi.org/10.1016/j.jcrimjus.2025.102425
[13] T. Ni, Z. Zhao, P. Zhang, Y. Zhao, K. Yang, and J. Liang, “A novel estimation strategy for the operating force at the end of joystick based on parameters identification,” Intell. Serv. Robot., pp. 1–14, 2025. https://doi.org/10.1007/s11370-025-00597-y
[14] M. Larbi, A. Maidi, E.-H. Guechi, and K. Belharet, “Extended state observer based-optimal control of a microrobot navigation along a trajectory generated by a joystick device,” IEEE Trans. Autom. Sci. Eng., 2025. https://doi.org/10.1109/TASE.2025.3566475
[15] A. Joice et al., “Applications of Raspberry Pi for Precision Agriculture—A Systematic Review,” Agriculture, vol. 15, no. 3, p. 227, 2025. https://doi.org/10.3390/agriculture15030227
[16] R. Biswas, A. Pandey, and S. Murugan, “Greenhouse Environment Monitoring Using Raspberry Pi,” in 2025 International Conference on Visual Analytics and Data Visualization (ICVADV), IEEE, 2025, pp. 549–554. https://doi.org/10.1109/ICVADV63329.2025.10961617
[17] S. Pecolt, A. Błażejewski, T. Krolikowski, I. Maciejewski, K. Gierula, and S. Glowinski, “Personal Identification Using Embedded Raspberry Pi-Based Face Recognition Systems,” Appl. Sci., vol. 15, no. 2, p. 887, 2025. https://doi.org/10.3390/app15020887
[18] M. B. Musthafa, S. Huda, T. T. Nguyen, Y. Kodera, and Y. Nogami, “Optimized Ensemble Deep Learning for Real-Time Intrusion Detection on Resource-Constrained Raspberry Pi Devices,” IEEE Access, 2025. https://doi.org/10.1109/ACCESS.2025.3584373
[19] N. Portillo, “Design and Implementation of an IoT Cluster with Raspberry Pi Powered by Solar Energy: A Theoretical Approach,” arXiv Prepr. arXiv2503.03618, 2025.
[20] S. Tselegkaridis, T. Sapounidis, C. Tokatlidis, S. Rapti, and D. Papakostas, “AABC: A Tool for Assessing Arduino Basic Coding Skills,” Comput. Appl. Eng. Educ., vol. 33, no. 3, p. e70029, 2025. https://doi.org/10.1002/cae.70029
[21] J. A. Ramos-Hernanz, D. Teso-Fz-Betoño, I. Aramendia, M. Erauzquin, E. Kurt, and J. M. Lopez-Guede, “Smart Low-Cost On-Board Charger for Electric Vehicles Using Arduino-Based Control,” Energies, vol. 18, no. 8, p. 1910, 2025. https://doi.org/10.3390/en18081910
[22] A. Shrivastava, S. J. Suji Prasad, A. R. Yeruva, P. Mani, P. Nagpal, and A. Chaturvedi, “IoT based RFID attendance monitoring system of students using Arduino ESP8266 & Adafruit. io on defined area,” Cybern. Syst., vol. 56, no. 1, pp. 21–32, 2025. https://doi.org/10.1080/01969722.2023.2166243
[23] M. Sharipov et al., “Recent progress in Arduino-and smartphone-based sensors for biochemical and environmental analysis,” TrAC Trends Anal. Chem., vol. 183, p. 118103, 2025. https://doi.org/10.1016/j.trac.2024.118103
[24] N. T. Tsebesebe, K. Mpofu, S. Sivarasu, and P. Mthunzi-Kufa, “Arduino-based devices in healthcare and environmental monitoring,” Discov. Internet Things, vol. 5, no. 1, pp. 1–31, 2025. https://doi.org/10.1002/oca.3218
[25] A. F. Güven, O. Ö. Mengi, M. A. Elseify, and S. Kamel, “Comprehensive Optimization of PID Controller Parameters for DC Motor Speed Management Using a Modified Jellyfish Search Algorithm,” Optim. Control Appl. Methods, vol. 46, no. 1, pp. 320–342, 2025, doi: 10.1002/oca.3218. https://doi.org/10.1002/oca.3218
[26] A. Sen, B. Singh, K. Mahtani, A. Moradzadeh, and S. M. Muyeen, “Optimized design of a permanent magnet brushless DC motor for solar water-pumping applications,” Results Eng., vol. 26, 2025, doi: 10.1016/j.rineng.2025.104633.
[27] E. Arévalo, R. Herrera Hernández, D. Katselis, C. Reusser, and R. Carvajal, “On Modelling and State Estimation of DC Motors,” in Actuators, MDPI, 2025, p. 160. https://doi.org/10.3390/act14040160
[28] S. Ekinci et al., “Advanced control parameter optimization in DC motors and liquid level systems,” Sci. Rep., vol. 15, no. 1, p. 1394, 2025. https://doi.org/10.1038/s41598-025-85273-y
[29] M. H. Setiawan, A. Ma’arif, M. F. Saifuddin, and W. A. Salah, “A Comparative Study of PID, FOPID, ISF, SMC, and FLC Controllers for DC Motor Speed Control with Particle Swarm Optimization,” Int. J. Robot. Control Syst., vol. 5, no. 1, pp. 640–660, 2025. https://doi.org/10.31763/ijrcs.v5i1.1764
[30] X. Zheng, H. Wen, X. Yang, X. Yu, and J. J. Rodriguez-Andina, “Adaptive neural zeta-backstepping with predefined damping ratio. Application to DC motors,” IEEE Trans. Cybern., 2025. https://doi.org/10.1109/TCYB.2025.3539544
[31] T.-H. Tsai, N.-C. Tung, and C.-Y. Chen, “An FPGA-Based Reconfigurable Convolutional Neural Network Accelerator for Tiny YOLO-V3,” Circuits, Syst. Signal Process., vol. 44, no. 5, pp. 3388–3409, 2025. https://doi.org/10.1007/s00034-024-02968-9
[32] S. Pericherla and E. Ilavarasan, “Cyberbullying detection and classification on social media images using Convolution Neural Networks and CB-YOLO model,” Evol. Syst., vol. 16, no. 2, p. 43, 2025. https://doi.org/10.1007/s12530-025-09656-2
[33] R. Raushan, V. Singhal, and R. K. Jha, “Damage detection in concrete structures with multi-feature backgrounds using the YOLO network family,” Autom. Constr., vol. 170, p. 105887, 2025. https://doi.org/10.1016/j.autcon.2024.105887
[34] R. Ayachi, Y. Said, M. Afif, A. Alshammari, M. Hleili, and A. Ben Abdelali, “Assessing YOLO models for real-time object detection in urban environments for advanced driver-assistance systems (ADAS),” Alexandria Eng. J., vol. 123, pp. 530–549, 2025. https://doi.org/10.1016/j.aej.2025.03.077
[35] S. Fu, H. Pan, J. Huang, X. Zhang, and Z. Jing, “AGD-YOLO: A forward-looking sonar target detection method with attention-guided denoising convolutional neural network,” Aerosp. Syst., pp. 1–16, 2025. https://doi.org/10.1007/s42401-025-00352-2
[36] S. Kang, Z. Hu, L. Liu, K. Zhang, and Z. Cao, “Object detection YOLO algorithms and their industrial applications: Overview and comparative analysis,” Electronics, vol. 14, no. 6, p. 1104, 2025. https://doi.org/10.3390/electronics14061104
[37] Y. Pan, G. Wang, and J. Yu, “Overview of deep learning YOLO algorithm,” in Fourth International Conference on Computer Vision, Application, and Algorithm (CVAA 2024), SPIE, 2025, pp. 622–630. https://doi.org/10.1117/12.3055712
[38] H. Yang, B. Liang, S. Feng, J. Jiang, A. Fang, and C. Li, “Lightweight UAV Detection Method Based on IASL-YOLO,” Drones, vol. 9, no. 5, p. 325, 2025. https://doi.org/10.3390/drones9050325
[39] J. E. Gallagher and E. J. Oughton, “Surveying You Only Look Once (YOLO) multispectral object detection advancements, applications and challenges,” IEEE Access, 2025. https://doi.org/10.1109/ACCESS.2025.3526458
[40] S. Ruan, C. Zhan, B. Liu, Q. Wan, and K. Song, “A high precision YOLO model for surface defect detection based on PyConv and CISBA,” Sci. Rep., vol. 15, no. 1, p. 15841, 2025. https://doi.org/10.1038/s41598-025-91930-z
Downloads
Published
Issue
Section
License
Copyright (c) 2025 Intan Permata Agustin (Author)

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.

